
The structure of 3D printer is usually designed according to printing materials and printing requirements, but its specific mechanical structure is reasonable. Different 3d printing technologies have different structures, but the same additive manufacturing is made layer by layer, so its principle is similar. The research on 3D printer structure is not only for a certain printing technology, but also for a general structure. By summarizing and analyzing the structure of existing 3D printers, it is helpful to further promote the development of 3D printers.
The 3D Printers Are Classified By Coordinate System Type
In order to complete 3D stereo printing, common 3D printers need to perform fixed point positioning in 3D space in different ways. At this time, they need to use the coordinate system to achieve positioning. In the development of 3D printer research, Cartesian coordinate system structure and polar coordinate system structure are common.
Cartesian coordinate system structure is the most common structure, which is very common in various 3d printing technologies. Its advantages lie in its simple structure and convenient manufacturing, but its disadvantages are also obvious. Because of the rectangular coordinate system, when printing the arc surface and arc, it can only be printed by the method of arc interpolation, which will lead to poor printing accuracy, and the printed arc surface will have a ladder shaped bulge.
Common 3D printers based on Cartesian coordinate system involve X, Y and Z movements, and the motion modes of the nozzle and printing platform can be summarized into three categories:
- The nozzle moves in the X and Y directions, and the printing platform moves in the Z direction independently. This type of motion has the characteristics of small mass and small volume compared with the workbench, and is suitable for high-precision compact 3D printers. However, the compound movement of the printer nozzle on the XY plane will affect the normal discharge of the printer nozzle, resulting in a decline in print quality.
- The nozzle moves in the X (or Y) and Z directions, and the printing platform moves in the Y (or X) direction independently. Or the nozzle can move in the X (or Y) direction independently, and the workbench can move in the Y (or X) and Z directions. This form of motion combines Z axis and X axis (or Y axis) for composite motion, which has a small amount of motion inertia, and the motion space required by the printing head and the working platform is small. The overall structure is relatively simple, which is widely used in the structural design of small household 3D printers.
- The printing platform makes a composite motion in the X and Y directions, and the nozzle only moves independently in the Z direction. The printer of this motion form has a simple and compact structure, but it requires high precision for Z-axis motion control. The movement of the printing platform in the XY plane requires large space, and the quality of the workbench is large, so it cannot be used for fast printing.
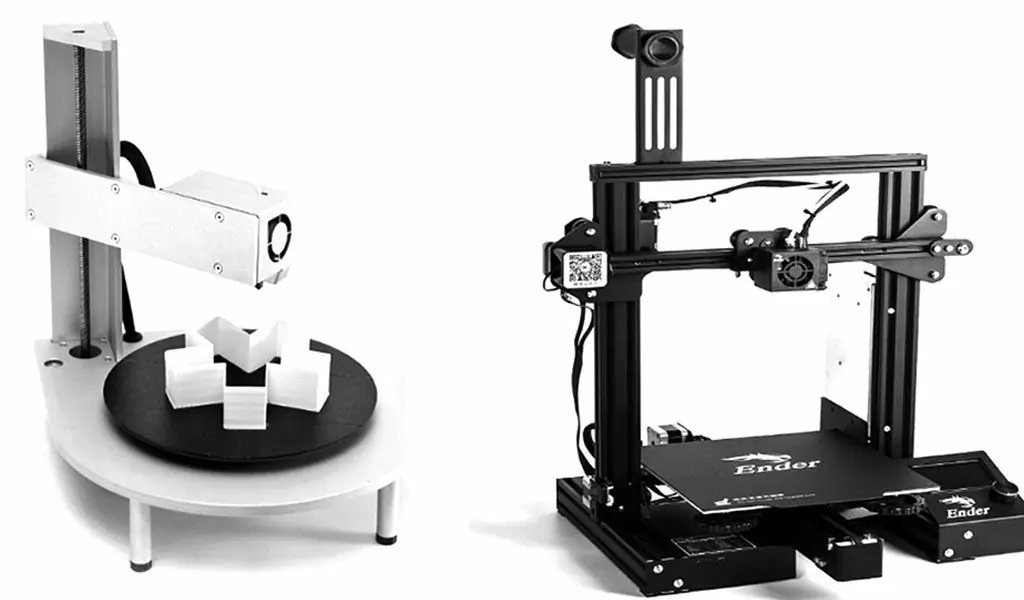
Polar coordinate system structure is a coordinate system composed of poles, polar axes and polar diameters in the plane. Because of the particularity of its principle, its printing structure can be simplified, so that it can run quietly and have a unique shape. The actions completed by complex mechanical structures are handed over to the software terminal to complete, and the mechanical structure is kept simple as far as possible.
Its advantages lie in that it can use a smaller 3D printer to print larger objects, and can print curved surfaces with higher accuracy. It has fast printing speed, good stability and simple control; The disadvantage is that the software is highly required and requires a lot of calculation.
The 3D Printers Are Classified By Appearance Structure
At present, the appearance structures of Aurora innovative commercial 3D printers mainly include triangular structure, rectangular rod structure, rectangular box structure and parallel arm structure. Different structures have their own characteristics and use scenarios, as shown in the following figure.
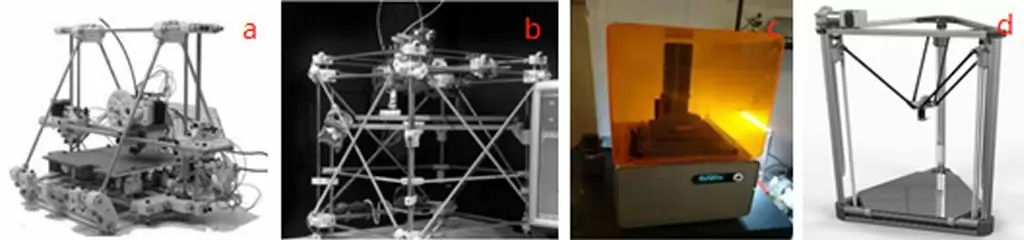
3D Printers With Different Shapes And Structures
The triangular structure is composed of a triangular frame, which is roof shaped, small in appearance and simple in structure. Due to its structural advantages, the printing head moves along the X and Z axes in the bracket, and can extend farther in the Y axis direction, increasing the printing size in the Y axis direction. However, its disadvantage is that the manufacturing accuracy of the machine body is low, which usually can only reach the mm level. When printing, the printed object moves forward and backward along the Y-axis with the hot bed, which is easy to lead to poor adhesion.
The rectangular bar structure is a cubic structure, which is usually built into a frame structure by bars and fasteners. The printing head is installed inside the frame and combined with the work platform to complete three-dimensional printing. The rectangular bar structure can not only match the assembly accuracy of the box structure, but also has the characteristics of simple and reliable triangular structure. However, the printing process is also characterized by large jitter, easy to produce large position errors, and difficult to maintain the level of the workbench during the printing process.
Rectangular box structure is the most common form of commercialization. From the perspective of the whole development process of 3D printing, this form of machine is also a relatively complete machine. The overall installation accuracy is high, and commercial 3D printers usually adopt this structure. The 3D printer usually adopts FDM technology with rectangular box structure, which uses synchronous belt structure internally. When the printing speed is too fast, it will produce large vibration, which will affect the printing accuracy. This structure is not only used by 3D printers of FDM technology, but also frequently used by other types of printing technologies.
Parallel arm structure is a kind of closed chain mechanism, among which the typical parallel mechanisms are Delta structure and Stewart structure, among which Delta structure is a parallel motion structure that was previously applied to the mechanical arm. It usually uses three branches of parallel arm, according to the movement of each branch in the Z-axis direction, it is transformed into the movement of the nozzle in three-dimensional space, so as to achieve three-dimensional printing.
This kind of structure is simple, and the printing precision is high, and the printing speed is fast. The disadvantage is that it requires a lot of calculation to convert the Z-axis motion of each branch into the motion of the nozzle. This kind of structure has excellent performance, but it has high requirements for software. It has an important development prospect in the field of 3D printers.
3D printers are used to glue and fix printing parts through the printing platform and stack them layer by layer in the Z axis direction to form a three-dimensional structure. No matter FDM technology or SLS technology, their forming principles are the same, so their general structures are similar.
Be-cu. Com to tell you that traditional 3D printers are supported by an external frame, with the motor as the power source, and driven by synchronous belt or screw rod and other mechanisms. The motion form of the nozzle and the printing workbench is selected according to the actual needs, so as to complete the printing of the three-dimensional structure. Common UV curing printing technology is slightly different from 3D printing technology such as selective laser sintering technology. Its type of 3D printer does not have a nozzle, but has a mechanism for material supply. Its mechanism principle is similar to that of the nozzle, which sends materials to the printing area.
The traditional 3D printer can no longer meet the printing demand in the increasingly developing 3D printing. At present, the mainstream 3D printer has gradually developed from the previous three degree of freedom mechanism to multi degree of freedom, and the nozzle mechanism of 3D printer is also changing, from single port to multi port. The structure is not limited to simple structure. At present, 5-DOF manipulator has been used for 3D printer, or combined with parallel structure to increase the DOF of working platform to achieve multi freedom printing.